2019年 4月16日

医療や福祉の現場はますます多様化を呈している。そのニーズを対応するために、AI、AR/VR技術などの最先端テクノロジーを活用することが、医療や福祉の未来を切り拓く鍵となることは間違いない。
それでは、現時点での最先端テクノロジーとは一体どのようなものなのだろうか。今回、早稲田大学理工学術院准教授の玉城 絵美氏に登場いただいた。玉城氏は、機械を介して人に触感や身体感覚を伝達するBody Sharing研究のパイオニア。氏によって独自に開発された、コンピュータが人間に手の動作を制御する装置「ポゼストハンド」は、2011年、米『TIME』誌の「世界の発明50」に選ばれている。国内はもちろん、世界でも注目を集めている研究者の一人だ。
「ポゼストハンド、VR技術を活用した、医療・福祉の未来」をテーマに玉城氏にお話しを伺った。「ポゼストハンド」をはじめとするVR技術が、医療や福祉の現場にどのように活用され、課題解決へと導いていくのか。また玉城氏自身が企業(H2L株式会社)の創業者であることをふまえて、中小企業は今後、どのようなアイディアや発想が求められるのか、など、全4回でご紹介していく。
「ポゼストハンド」開発のきっかけについて
きっかけは、私自身が「部屋にいたい主義」、「インドア派」だったからです。また、子供の頃から入院が多かった、という事もあります。
入院して病室の中にいると、外での体験はできませんし、外に作用する(=外に影響を与える)ことができません。外の情報は手に入りますが、入院している患者が外に作用することはできない。病室にいて社会的に活躍するには、今のところ難しい状況にあります。テレビ会議でしゃべる程度ならできますが、物理的に関与することが難しいのです。
私自身、家族と旅行に行けなかったり、友達は合宿に行っていたのに、自分だけ行けなかったり、といったことが多々あり、インドア派と言いながらも、そのような状況を残念に思っていました。入院生活自体は多くの医療関係者のおかげで快適に過ごせましたが、一方で、まだまだ、自分が出かけていかなければ体験できないことがある、と感じました。
そのような中、この原因は身体の動きを入出力するインターフェースがないからだと気づいたのです。高校時代に入院していた時でした。インターフェースは、例えばキーボードやトラップパット、マウス、ディスプレイ等、情報を入出力するもの。視覚情報や聴覚情報、言語情報は入出力できますが、コンピュータを経由して身体の動きを入れたり出したりはできないですよね。それができれば、部屋の中にいても外の世界に作用できるようになると思いついたのです。
このことを実現するために、まず大学で何を学べば良いのか、計画を練るようになりました。「作用するシステム、インターフェースを作るにはどのようにしたらいいか」を考えて、そのステップの中で、コンピュータから人間に身体の動きをどのように伝えるか、という研究をしました。その成果の一つが、コンピュータが人間に手の動作を制御する装置「ポゼストハンド」です。
ポゼストハンド開発のきっかけは「外に出なくても、あるいは出られなくても、外の世界を体験したい、と考えたから」と玉城氏。そんな想いからはじまった、研究開発の道のりは決して平坦ではなかったはずだ。開発を実現するために、どのような計画を考えたのだろうか。
開発の経緯や自身の想いについて
はじめは「こういったツールが世の中にあるのでは」と思って、買いたいと思っていました。ところが調べてみましたがどこにも売ってなかったんですね。私が高校生だった2000年頃、ロボットもたくさんできてきましたが、まだ研究段階で、とても買えるものではありませんでした。ロボットはインターフェースではないですしね。それならば自分で開発をしてみたい、と考えるようになりました。
私だけの問題ではなく、もしも誰も開発を手掛けずスタートが10年遅れたら、10年の間に病院ではたくさんの方が外の世界を体験することなく、亡くなっていくでしょう。そうした方たちのことを思うと、1年でも早く開発したいと考えるようになりました。ちょっとでも皆さんが外に作用して体験を共有できるようになればいいと。完成しなくても、私が何か動き出すことで、少しでも研究に貢献できれば実現までの時間短縮ができるだろうと考えたのです。
そして高校卒業後に琉球大学工学部に入って学んでいきました。その中で実際にロボット研究をされている方々と交流して、計画を練っていると「どうやら、私が生きている間に実現しそうだ」ということがわかりました。
インターフェースとロボットはそれぞれ、両方とも勉強しなければならないので、その後、筑波大学の大学院に移ってから最初はロボットの勉強を始めました。ここでロボット開発の研究者はかなり多いものの、インターフェースの研究がほとんどされていないことに気づいたのです。
玉城氏いわく、当時は「ロボットの開発は自分がやらなくても、他の研究者が開発を進めてくれると感じた」とのこと。そして自身の研究開発を進めるためには、新しいインターフェースがいよいよ不可欠なことに気づく。高校時代に病室で考えたアイディアが、徐々にではあるが具現化していったのだ。
固有感覚が伝えられる新たなインターフェースとは
研究開発のためには、インターフェースが全然足りていないことに気づいて、今度は、インターフェースの研究に入っていきました。私が外に出る時に足りないと思ったのは「固有感覚」と呼ばれる感覚で、「深部感覚」ともいいます。
“ツルツル”、“ザラザラ”とか、“温かい”や“冷たい”といったものは「表面感覚」や「表層感覚」と呼ばれています。そういうものではなくて、「固有感覚」で有名なのは、「位置覚」、または「重量覚」と呼ばれるものです。それらがないと「今、手がこれぐらい曲がっている」という位置の情報だったり 「これぐらい力が入っています」ということが伝わらないのです。
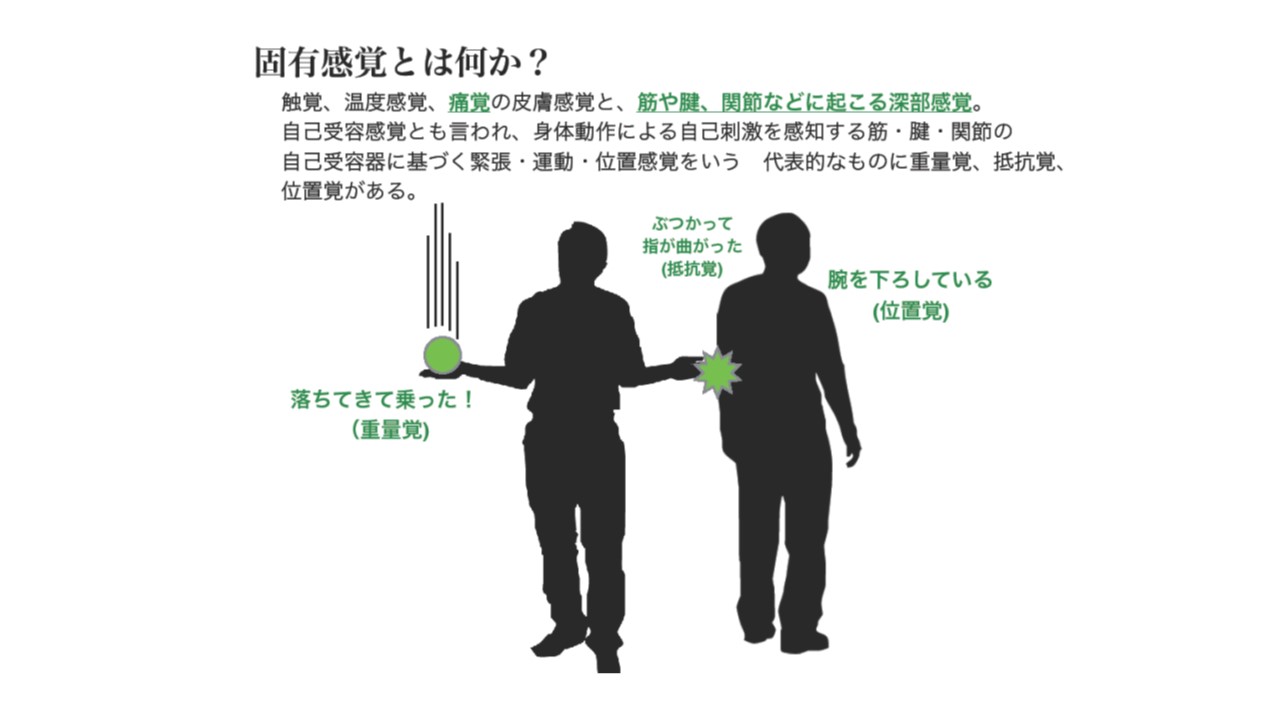
例えば、カヤックを漕いで「パドルがこんなに重いんだよ」と言っても、言葉だけでその感覚はわかりません。「水を掻こうとしても、これだけ抵抗があるよ」といった情報は、“ツルツル”、“ザラザラ”といた感覚では伝わらないのです。「ここをどうにかしないといけない」と思いました。
今までは「固有感覚」が伝えられるインターフェースの研究がほとんどされていませんでした。遠隔地からの、手の抵抗覚や「こういうふうに指が曲がっています」という情報をコンピュータから人間に出力するものがなかったのです。「そもそも伝わるのか?」というレベルでした。
実験しなければ進みませんので、今度は東京大学大学院にいた時にポゼストハンドの原型となるものを作ってみました。ポゼストハンドは元々、実験用のツールとして生み出されたものだったのです。

玉城氏のポゼストハンド開発の経緯を伺っていると、開発したいものが先にあり、その研究開発のために様々な分野を学んできたことがわかる(下記の経歴参照)。ポゼストハンドの試作品も自身の手でハンダづけをして製作したというが、これもあくまで開発を進めるための過程としてだった。目的の明快さが研究開発の手法とスピードに反映されているようだ。
次回はいよいよポゼストハンドの仕組みや、さらにVR技術の活用例についてお話しを伺う予定だ。
<連載第1回・完>
連載「中小企業と大学が連携し合って、Win-Winの関係になることが理想」
玉城 絵美(たまき・えみ)
早稲田大学准教授
1984年沖縄県生まれ。2006年琉球大学工学部情報工学科卒。2008年筑波大学大学院システム情報工学研究科修士課程修了。2009年東京大学エッジキャピタル(UTEC)にてシーズ探索インターン。2010年 Disney Research Pittsburghにて研究に従事する。
2011年コンピュータが人間に手の動作を制御する装置「ポゼストハンド」を発表、多数の学会で注目を浴びる。「ポゼストハンド」は、米国のCNNやABCで報道され,『Time』誌が選ぶ50の発明に選出される。同年,東京大学大学院にて博士号取得。「東京大学総長賞」受賞と同時に総代をつとめる。
研究用装置を研究者に提供し消費者へ共有するため,2012年にH2L株式会社を創業。2013年 早稲田大学に移籍し,研究活動も継続。2015年 KickStarterにて世界初触感型ゲームコントローラ「アンリミテッドハンド」を発表し22時間で目標達成。さらに同年 「日経ウーマン ウーマンオブザイヤー準大賞」受賞。2016年 「WIRED Audi Innovation Award 2016」、「日経ビジネス 次代をつくる100人」、「科学技術・学術政策研究所 (NISTEP) ナイスステップな研究者(科学技術への顕著)賞」受賞。同年から内閣府 総合科学技術・イノベーション会議、科学技術イノベーション政策推進専門調査会にて第5期科学技術基本計画の総合戦略に関する委員を務める.2017年 外務省 WINDS(女性の理系キャリア促進のためのイニシアティブ)大使に任命される。2019年現在は、早稲田大学理工学術院准教授を務めている。
取材日:2019年3月14日